
I work at The National Key Laboratory of Autonomous Intelligent Unmanned Systems, Tongji University as a professor. In the lab, I cowork with He Bin (何斌).
I am now working on smart cities, community resilience, climate change and energy saving devices and strategies. If you are seeking any form of academic cooperation, please feel free to email me at kelvinfkr@tongji.edu.cn. I will have a Ph.D. opening next year and looking for RAs.
I graduated from Tsinghua University with a bachelor’s degree in engineering advised by Quanwang Li (李全旺) and a dual bachelor degree in math advised by Jun Ye(叶俊). I graduated with a Ph.D’s degree in School of Engineering and Applied Science, Department of civil and environmental engineering advised by Ning Lin and also did a post doc there also. I also worked as a STEP research fellow under supervison of Michael Oppenheimer at Center for Policy Research on Energy and the Environment (C-PREE) and Princeton School of Public and International Affairs (SPIA) at Princeton University.
I collaborate with Young experts as Wei Ma (马玮), Dazhi Xi (席大智), Cao Wang (王草) and Xuanhong Chen (陈炫宏) and senior experts as Robert Kopp, Bruce Ellingwood and Min Ouyang (欧阳敏) closely.
I have published 20+ papers. For a full list of pubilcations, you could go to my google scholar webpage:
我目前在同济大学的国家智能无人系统重点实验室担任教授,与何斌教授合作。我去年入选国家高层次青年人才(海外),上海市领军人才(海外)。我的研究方向涵盖智慧城市、社区韧性、气候变化以及节能设备和策略。如果您有任何形式的学术合作意向,请随时通过kelvinfkr@tongji.edu.cn与我联系。我目前科研经费充裕。我有多个明年入学的博士名额,将首先通过科学中心的夏令营进行录取;并正在寻找研究助理和博士后。
我毕业于清华大学,获得工程学士学位,导师是李全旺教授,并且获得数学双学位,导师是叶俊教授。我在普林斯顿大学获得工程博士学位,导师是Lin Ning教授,后在那里进行了博士后研究。我还在普林斯顿大学的能源与环境政策研究中心(C-PREE)和普林斯顿大学公共与国际事务学院(SPIA)担任STEP研究员,导师为Michael Oppenheimer教授。
我还与青年专家如马玮、席大智、王草和陈炫宏,以及资深专家如Robert Kopp,Bruce Ellingwood 和欧阳敏紧密合作。
我已发表20多篇论文。欲了解完整的发表清单,请访问我的谷歌学术主页
🔥 News
- 2024.04: I join The National Key Laboratory of Autonomous Intelligent Unmanned Systems, Tongji University as a professor. 我于2024年4月加入同济大学国家智能无人系统重点实验室,担任教授职务。
📝 Selected Publications / 代表性论文
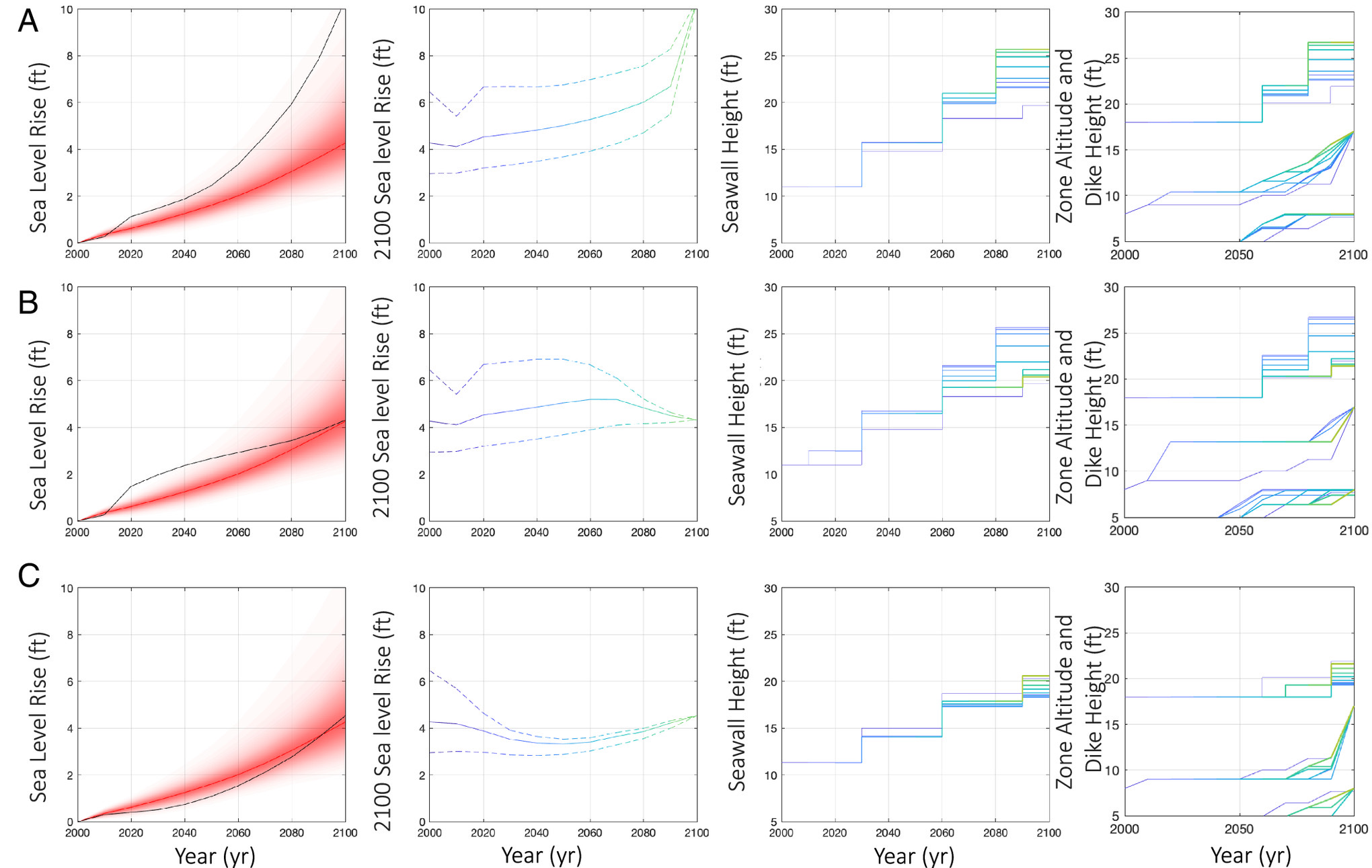
《基于强化学习的自适应气候适应策略:纽约曼哈顿海岸洪水风险管理应用》
Kairui Feng, Ning Lin, et al.
-
Reinforcement learning reduces coastal flood adaptation costs by up to 77%. 强化学习可将沿海洪水适应成本最多降低77%。
-
RL integrates protection, accommodation, and retreat strategies for higher efficiency. 强化学习整合防护、适应与退避策略,提升经济效益。
-
RL effectively controls tail risks and adapts to climate uncertainties. 强化学习有效控制尾部风险,适应气候不确定性。

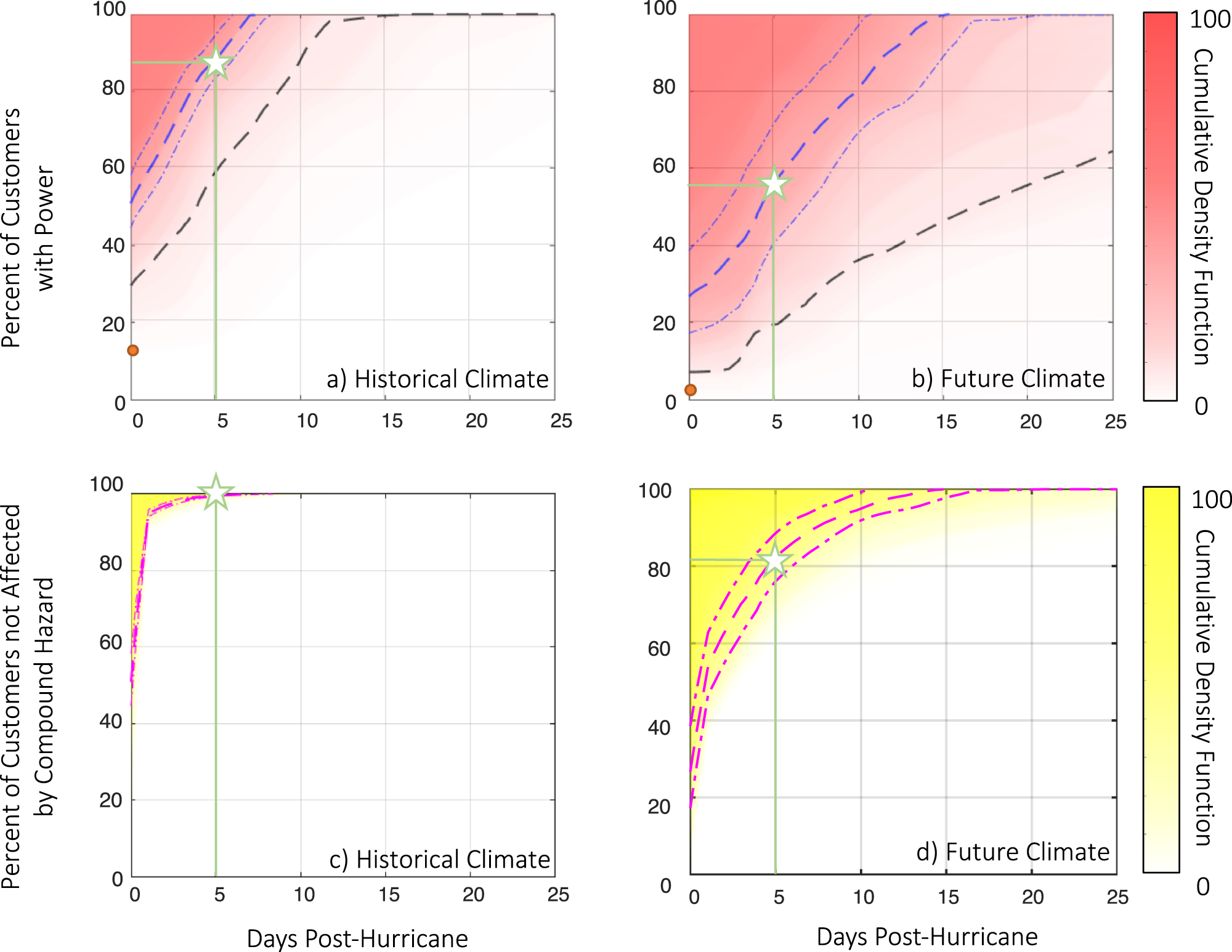
Hurricane Ida’s blackout-heatwave compound risk in a changing climate
《气候变化背景下飓风“艾达”引发的停电-热浪复合风险评估》
Kairui Feng, Ning Lin, et al.
-
Return period of Ida-like compound events drops from 278 to 16.2 years under SSP5-8.5. “艾达级”复合灾害重现期将从278年降至16.2年(SSP5-8.5)
-
Heatwave intensification is the dominant driver, increasing risk by 3–5 times. 热浪增强是风险上升的主要驱动因素,可使风险提升3–5倍
-
Study informs grid resilience and adaptation strategies, such as levee upgrades and distributed energy systems 研究为电网韧性提升与气候适应策略(如加高海堤、分布式能源)提供量化依据
Tropical cyclone-blackout-heatwave compound hazard resilience in a changing climate
《气候变化下台风-停电-热浪复合灾害韧性研究》
Kairui Feng, Min Ouyang, Ning Lin

RainNet: A large-scale imagery dataset and benchmark for spatial precipitation downscaling
《RainNet:空间降尺度降水图像数据集与基准》
Xuanhong Chen, Kairui Feng (co-first), et al.
-
Compiled a comprehensive real-world precipitation dataset (1979–2018). 收集并整理覆盖1979–2018年的大规模实测降水数据集。
-
Evaluated multiple downscaling methods to accurately model high-resolution rainfall patterns. 系统评估多种降尺度方法,提升高分辨率降水预测精度。
-
Provided high-resolution (4km) rainfall dataset and benchmark tools. 公布高分辨率(4km)降水数据及评估基准。
Download 数据集: Google Drive | 代码仓库: Github.
🤔 Resources 资源
课题组论文阅读报告1(2025/7-2025/9)
[报告1](https://drive.google.com/file/d/11CkuKoWtBocfYouxiklIbCX3AZWCkaJD/view?usp=drive_link)- 卫雯奇翻译的平均场博弈论教材: 翻译1
🧑💻 Teammate/团队成员


Wenqi Wei (卫雯奇), Tongji University (同济大学), Email:wai@tongji.edu.cn (和何斌老师一起指导)
Wenqi Wei is currently a doctoral student majoring in Intelligent Science and Technology at Tongji University. She has obtained her master’s degree from the Urban Mobility Institute of Tongji University. Her research focus is on operational decision-making in transportation. In terms of competitions, she has won the National Second Prize in the China Undergraduate Mathematical Modeling Contest, and the H Award in the American Mathematical Contest in Modeling. Regarding academic achievements, she has published papers in journals such as 《Transportmetrica A》.
卫雯奇现在就读于同济大学智能科学与技术专业,博士一年级,硕士毕业于同济大学城市交通研究院。她的研究方向是智能运筹决策。在竞赛方面,她曾获全国大学生数学建模竞赛二等奖,美国大学生数学建模竞赛H奖。在科研方面,她曾在《Transportmetrica A》等期刊上发表论文。

Qili Shen (沈启立), Tongji University (同济大学), Email:2311788@tongji.edu.cn (和宋越老师一起指导)
Qili Shen specializes in intelligent decision-making systems for urban low-altitude air mobility, focusing on 3D trajectory optimization and vertiport location-allocation in dense urban airspace networks.
Qili Shen is currently pursuing his doctoral studies as a direct Ph.D. candidate in Intelligent Science and Technology at Tongji University. He completed his undergraduate education at the same institution, majoring in Mathematics and Applied Mathematics. His research focuses on intelligent decision-making systems for urban low-altitude air mobility, focusing on 3D trajectory optimization and vertiport location-allocation in dense urban airspace networks. Regarding academic achievements, he has been awarded the National Second Prize in the China Graduate Mathematical Modeling Competition, the National Second Prize in the China Undergraduate Mathematical Modeling Contest, and the National Second Prize in the China Collegiate Data Analysis Challenge.
沈启立现在就读于同济大学智能科学与技术专业,直博生博士二年级,本科就读于同济大学数学与应用数学专业。他的研究方向是面向城市低空交通的智能决策系统研究,针对高密度城市环境下的低空空域路径规划与选址。在科研竞赛方面,他曾获研究生数学建模竞赛国家级二等奖,全国大学生数学建模竞赛二等奖,中国高校数据分析大赛全国二等奖等。

Danru Yang (杨丹茹), Tongji University (同济大学/上海创智学院)
✉ danruyang@outlook.com
Yang Danru is a direct doctoral student of the 2026 grade at the Shanghai Research Institute for Intelligent Autonomous Systems (National Key Laboratory of Autonomous Intelligent Unmanned Systems), Tongji University.She studied Applied Chemistry at Tongji University for her undergraduate degree. Her current research direction is large language models, and she will focus on the direction of ai for science in the future. In terms of scientific research, she was once in charge of a national-level innovation and entrepreneurship project, which won the first prize at the university level.
杨丹茹是同济大学上海自主智能无人系统科学中心(自主智能无人系统全国重点实验室)的2026级直博生。她本科就读于同济大学应用化学(强基计划)专业。她目前的研究方向是大语言模型,未来将聚焦于人工智能驱动科学研究方向 。在科研方面,她曾负责过一项国家级创新创业项目,项目曾获校级一等奖。
Jiaxin Fan (范嘉鑫), Tongji University (同济大学/上海创智学院), coadvised with Dingyu Long(和丁玉隆老师一起指导)
Jiaxin Fan is a Ph.D. student at the Shanghai Research Institute for Intelligent Autonomous Systems (National Key Laboratory of Autonomous Intelligent Unmanned Systems), Tongji University. His research focuses on key enabling technologies in the emerging field of low-altitude economy, particularly specializing in intelligent autonomous control systems, dynamic decision-making algorithms, and swarm cooperative coordination strategies for unmanned aerial vehicles (UAVs).
范嘉鑫是同济大学上海自主智能无人系统科学中心(自主智能无人系统全国重点实验室)的2025级直博生。他目前的研究聚焦低空经济领域,主要开展无人机智能自主控制、动态决策与集群协同控制等关键技术研究.
Xinyao Wang (王馨瑶), Tongji University (同济大学), coadvised with Yue Song(和宋越老师一起指导) ✉wxy366978373@163.com
Xinyao Wang is a direct PhD student (class of 2025) at the Shanghai Research Institute for Intelligent Autonomous Systems (National Key Laboratory of Autonomous Intelligent Unmanned Systems), Tongji University. She received her undergraduate education in Engineering Management at Dalian University of Technology. Her current research focuses on operations research, with primary studies in intelligent recommendation systems, Cost Per Sale, and path planning technologies.
王馨瑶是同济大学上海自主智能无人系统科学中心(自主智能无人系统全国重点实验室)的2025级直博生。她本科就读于大连理工大学工程管理专业。她目前的研究聚焦于运筹学,主要开展智能推荐系统、按销售付费与路径规划等技术研究。

Minghao Yin (尹铭昊), Tongji University (同济大学) Email: yinminghaozsa@163.com
Minghao Yin is currently a doctoral student at the Shanghai Research Institute for Intelligent Autonomous Systems, Tongji University. He obtained his master’s degree from Tongji University as well. His research focuses on the practical applications of artificial intelligence in emerging fields such as urban low-altitude economy and resilient low-carbon power systems. In terms of scientific research, his research papers have been published in Journal of Hunan University (Natural Sciences) and Materials.
尹铭昊是同济大学上海自主智能无人系统科学中心的2025级博士生,硕士毕业于同济大学。他目前的研究聚焦于人工智能在城市低空经济、韧性低碳电力系统等新兴实际领域的应用。在科研方面,他曾在《湖南大学学报(自然科学版)》和《Materials》等期刊上发表过论文。

Yue Wu (武越) Tongji University (同济大学/上海创智学院), coadvised with Xuanhong Chen (和陈炫宏老师一起指导) ✉ wy710502827@gmail.com
Yue Wu is currently working as a Research Assistant at the Shanghai Research Institute for Intelligent Autonomous Systems, incoming doctoral student in 2026. He obtained his master’s degree from University of Southern California. His research currently focuses on 3D reconstruction and video generation. Moving forward, he aims to explore practical applications of AI in emerging domains such as low-altitude economy systems, climate changing and related real-world scenarios.
武越现在是同济大学上海自主智能无人系统科学中心的研究助理,将于2026年作为博士生加入。他在南加州大学获得硕士学位。他目前的主要研究方向为3D重建和视频生成。未来将聚焦于探索人工智能在低空经济系统、气候变化和相关现实场景等新兴领域的实际应用。

Meilu Yuan (袁美璐), Tongji University (同济大学/上海创智学院), coadvised with Xuanhong Chen (和陈炫宏老师一起指导)
✉ 2510251@tongji.edu.cn
Meilu Yuan is currently a doctoral student at Tongji University. She obtained her master’s degree from Sun Yat-sen University. In terms of academic achievements, she has obtained more than 20 patents, mainly focusing on the fields related to large language models. Meanwhile, her research papers have been published in Scientometrics and Modern Information. Regarding competition honors, she has won the National First Prize in the National Postgraduate Mathematical Modeling Competition, the National Second Prize in the National College Students Mathematical Modeling Competition, and other awards.
- Papers published in Scientometrics and Modern Information.
袁美璐现在就读于同济大学,研究生毕业于中山大学。在学术成果方面,她已获得20余项专利,主要集中在与大语言模型相关的领域。与此同时,她的研究成果发表在《科学计量学》(Scientometrics)和《现代情报》(Modern Information)上。在竞赛荣誉方面,她曾获得全国研究生数学建模竞赛全国一等奖、全国大学生数学建模竞赛全国二等奖等。
- 在《科学计量学》(Scientometrics)和《现代情报》(Modern Information)上发表过论文。

Xiaohan Xu (徐笑涵), Tongji University (同济大学), Email: kidhanhan123@gmail.com (和何斌老师一起指导)
Xu Xiaohan is a postdoctoral fellow at the Shanghai Research Institute for Intelligent Autonomous Systems (National Key Laboratory of Autonomous Intelligent Unmanned Systems), Tongji University. His current research focuses on smart cities and resilience, such as multi-modal public transit network reliability, critical infrastructure resilience, etc. In terms of scientific research, he has published 7 papers as the first author (including cases where the supervisor is the first author and the student is the second author).
徐笑涵是同济大学上海自主智能无人系统科学中心(自主智能无人系统全国重点实验室)的博士后。他当前的研究聚焦于智慧城市与韧性领域,涵盖多模式公共交通网络可靠性、关键基础设施韧性等方向。在科研方面,他以第一作者(含导师一作学生二作)发表文章7篇。